
Учебно-лабораторный макет автоматизированной робототехнической ячейки представляет собой робототехнический комплекс на базе 5DOF манипуляционного РТК с угловой кинематикой, 3DOF манипулятора с плоско-параллельной кинематикой и комплекта "смарт-устройств", управляемого с помощью клиент-серверного ПО, устанавливаемого на персональный компьютер учащегося. Применение РТК в образовательном процессе позволяет познакомить учащихся с принципами проектирования и конструирования манипуляционных роботов, основам разработки управляющего ПО и базовым принципам построения архитектур систем управления гибких производственных ячеек.
Представленные в данном робототехническом комплексе манипуляционные РТК построены на базе интеллектуальных сервомодулей, которые имеют последовательный интерфейс управления для коммутации друг с другом посредством последовательной шины. В состав комплекта входит программное обеспечение для программирования в текстовом редакторе на подобии Arduino IDE, а также с помощью скриптов на языке Python и для разработки систем управления на основе ROS. А благодаря входящей в состав учебно-лабораторного комплекса виртуальной модели манипулятора, учащиеся имеют возможность моделировать алгоритмы систем управления с помощью графической среды.
В состав учебно-лабораторного макета автоматизированной робототехнической ячейки входит:
1) Учебно-лабораторный комплект для разработки манипуляционных роботов с угловой кинематикой
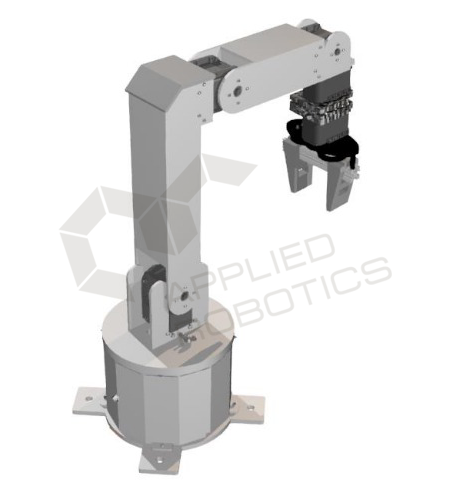
Учебный манипулятор с угловой кинематикой предназначен для перемещения и ориентации объектов в пространстве со сферической системой координат и имитации технологических операций. Учебный манипулятор реализован на основе интеллектуальных сервоприводов с последовательным коммуникационным интерфейсом управления, оснащенных трехконтурной системой управления с настраиваемыми параметрами регуляторов. Конструкция учебного манипулятора выполнена по блочно-модульному принципу и может быть модифицирована за счет применения ресурсных комплектов и аксессуаров.
В состав комплекта для разработки манипуляционных роботов с угловой кинематикой входит:
- сервоприводы Dynamixel MX-106 (1 шт), MX-64 (1 шт), МХ-28 (2 шт), АХ-18 (2 шт);
- программируемый контроллер с интегрированным одноплатным микрокомпьютером с поддержкой интерфейсов Ethernet и WiFi для коммуникации со смарт устройствами;
- вычислительный "смарт"-контроллер и периферийная плата для реализации "смарт-устройств" и беспроводной коммуникации между ними;
- модуль управления вакуумным захватом.
2) Учебно-лабораторный комплект для разработки манипуляционных роботов с плоско-параллельной кинематикой
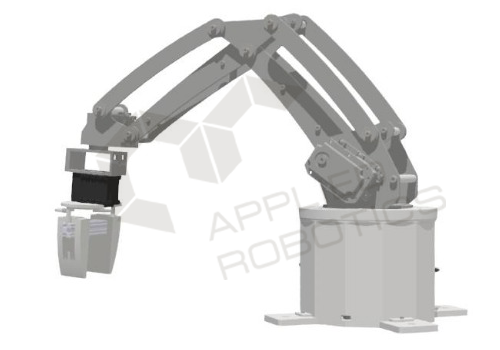
Учебный манипулятор с плоско-параллельной кинематикой предназначен для перемещения и ориентации объектов в пространстве с цилиндрической системой координат и имитации технологических операций. Учебный манипулятор реализован на основе интеллектуальных сервоприводов с последовательным коммуникационным интерфейсом управления, оснащенных трехконтурной системой управления с настраиваемыми параметрами регуляторов. Конструкция учебного манипулятора выполнена по блочно-модульному принципу и может быть модифицирована за счет применения ресурсных комплектов и аксессуаров.
В состав комплекта для разработки манипуляционных роботов с плоско-параллельной кинематикой входит:
- сервоприводы Dynamixel MX-106 (1 шт), MX-64 (1 шт), МХ-28 (2 шт), АХ-18 (2 шт);
- программируемый контроллер с интегрированным одноплатным микрокомпьютером с поддержкой интерфейсов Ethernet и WiFi для коммуникации со смарт устройствами;
- вычислительный "смарт"-контроллер и периферийная плата для реализации "смарт-устройств" и беспроводной коммуникации между ними;
- модуль управления вакуумным захватом.
3) Комплект смарт-устройств для разработки макета производственной линии
Комплект "смарт"-устройств совместим с учебными манипуляторами и прочим оборудованием, входящим в макет автоматизированной робототехнической ячейки.
В состав комплекта смарт-устройств для разработки макета производственной линии входит:
- Модуль кнопочного терминала;
- Модуль светосигнальной лампы;
- Модуль пульта управления
4) Комплект для сборки макета соревновательного полигона.
5) Программное обеспечение для управления учебно-лабораторными манипуляционными РТК.
6) Программное обеспечение для управления макетом автоматизированной робототехнической ячейки
7) Учебно-методический комплекс