Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
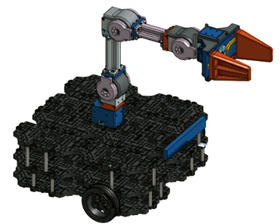
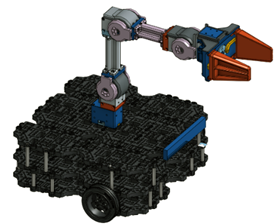
Образовательный робототехнический комплект "Мобильный манипуляционный РТК" представляет собой набор для разработки автономного мобильного робота с установленным на него манипулятором.
В состав образовательного робототехнического комплекта "Мобильный манипуляционный РТК" входит:
1) Мобильный робот
Расширенный робототехнический комплект на базе ROBOTIS TurtleBot3 Waffle представляет собой расширенную платформу для изучения основ программирования автономных мобильных роботов под управлением пользовательского программного обеспечения, реализуемого в свободно распространяемой операционной системы ROS.
Расширенный робототехнический комплект на базе ROBOTIS TurtleBot3 Waffle дает возможность пользователю разрабатывать собственные модели роботов на основе базового шасси, устанавливать дополнительное навесное оборудование или механизмы.
- Программируемый микрокомпьютер – 1 шт.
- Периферийный контроллер – 1 шт.
- Лазерный сканирующий дальномер – 1 шт. Предназначен для сканирования окружающего пространства и измерения расстояний до окружающих объектов.
- Камера – 1 шт.
- Аккумуляторная батарея – 1 шт.
- Интеллектуальные сервомодули ведущих колес – 2 шт.
- Джойстик – 1 шт.
- Комплект модулей беспроводной связи – 1 шт.
- Расширенный комплект конструктивных элементов.
2) Манипуляционный робот
Учебный манипулятор ROBOTIS Open Manipulator – X представляет собой блочно-модульную модель манипуляционного робота, совместимую с модель мобильного робота TurtleBot3 WafflePi.
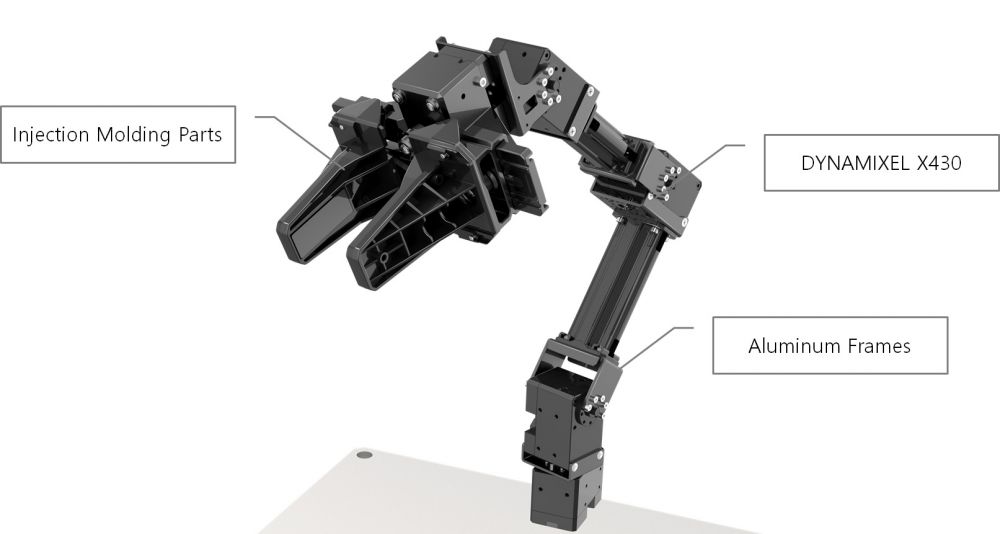
В состав учебного манипулятора входит:
- Интеллектуальный сервомодуль – 5 шт.
- Комплект конструктивных элементов – 1 шт.
- Комплект информационных и сенсорных систем.
Комплект информационных и сенсорных систем предназначен для разработки систем управления автономных манипуляционных роботов. В состав комплекта входит:
- Интеллектуальный модуль технического зрения
- Модуль стереозрения
- Комплект датчиков.
Применение РТК в образовательном процессе позволяет познакомить учащихся с принципами проектирования и конструирования манипуляционных роботов, основам разработки управляющего ПО и базовым принципам построения архитектур систем управления гибких производственных ячеек. В состав комплекта должно входить программное обеспечение для программирования в текстовом редакторе на подобии Arduino IDE, программировании с помощью скриптов на языке Python, разработки систем управления на основе ROS. Также в состав комплекта должна входить виртуальная модель манипулятора для моделирования алгоритмов систем управления с помощью графической среды.