Конструктор для изучения многокомпонентных робототехнических систем и манипуляционных роботов предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов.
Конструктор представляет собой учебное решения для проведения занятий в соответствии с учебной программой в учебных заведениях «Точка Роста», «Кванториум», «ИТ-куб» и т.п.
Конструктор предназначен для разработки наиболее распространеных моделей манипуляторов, применяемых в промышленных задачах. Применение конструктора в учебном процессе обеспечивает наглядную демонстрацию оборудования и промышленных технологий.
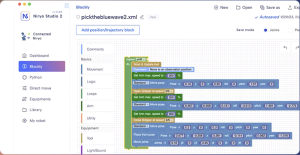
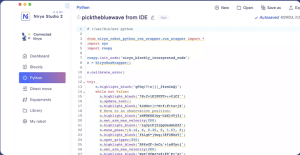
Для расширения функциональных возможностей учебного оборудования для программирования моделей манипуляторов может применяться свободно распространяемое программное обеспечение Nyrio Studio для программирования модели манипуляционного робота в блочно-графической среде разработки, с помощью языка программирования Python, а также моделирования в трехмерной среде.
Дополнительно в состав комплекта входит программное обеспечение для симуляции работы манипуляторов в среде Webots под управлением ROS.
В состав комплекта входит:
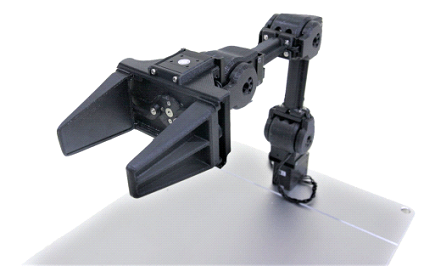
⦁ Комплект конструктивных элементов из металла для сборки модели манипуляционного робота с угловой кинематикой
⦁ Комплект конструктивных элементов из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой
⦁ Комплект конструктивных элементов из металла для сборки модели манипуляционного робота с DELTA кинематикой
⦁ Крепежные элементы (винты и гайки различного номинала и длины)
⦁ Соединительные кабели различной длины
Конструктивные элементы , входящие в состав набора соответсвуют требованиям к конструкции манипуляционных роботов для проведения урока технологии в детском технопарке.
⦁ Интеллектуальный сервомодуль XL431-T250-T с интегрированной системой управления, 7 шт
Сервомодуль представляет собой принципиально новое технического решение нового поколения в линейки интеллектуальных сервомодулей. Отличительная особенность сервомодуля заключается в датчике положения выходного вала повышенной точности (14бит), что обеспечивает возможность точности и плавности регулирования вращения в процессе управления.
Сервомодуль представляет собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор, встроенную систему управления. Сервомодуль обладает интегрированной системой управления, обеспечивающей обратную связь, контроль параметров — положение вала, скорость вращения, нагрузка привода, а также обеспечивающей возможность последовательного подключения друг с другом и управления сервомодулями по последовательному полудуплексному асинхронному интерфейсу.
⦁ Робототехнический контроллер, 1 шт
Робототехнический контроллер представляет собой модульное устройство, включающее в себя одноплатный микрокомпьютер для выполнения сложных вычислительных операций, периферийный контроллер для управления внешними устройствами и плату расширения для подключения внешних устройств. Модули робототехнического контроллера обладают одновременной конструктивной, аппаратной и программной совместимостью друг с другом.
⦁ Комплект для сборки пневмосистемы, 1 шт
⦁ Универсальный вычислительный модуль, 1 шт
⦁ Плата расширения универсального вычислительного модуля, 1 шт
⦁ Модуль технического зрения, 1 шт
Модуль технического зрения представляет собой вычислительное устройство со встроенным микроконтроллером, интегрированной телекамерой и оптической системой.
⦁ Адаптер питания от сети 220 В, 1 шт.
⦁ Сетевой кабель адаптера питания, 1 шт.
⦁ USB интерфейсный кабель для программирования программируемого контроллера, 1 шт.
⦁ Модуль тактовой кнопки, 3 шт
⦁ Модуль светодиода, 3 шт
⦁ Модуль концевого прерывателя, 3 шт
⦁ Модуль датчика цвета, 1 шт.
⦁ Модуль RGB светодиода, 3 шт.
⦁ Программное обеспечение для визуализации 3D моделей манипуляционного робота
Программное обеспечение обеспечивает трехмерную визуализацию модели манипуляционного робота (с угловой, плоскопараллельной и дельта-кинематикой) в процессе работы, обеспечивать построение пространственной траектории движения исполнительного механизма манипуляционного робота, возможность задания последовательности точек для прохождения через них исполнительного механизма манипуляционного робота. Программное обеспечение обеспечивает возможность построения графиков заданных и текущих обобщенных координат манипуляционного робота, графиков значений скоростей и ускорения, графиков расчетных значений нагрузки. Программное обеспечение позволяет задавать последовательность передвижений манипулятора посредством набора команд в блочно-графическом интерфейсе.
⦁ Учебное пособие на русском языке, 6 шт